Presented in the 4th International and 19th National Conference on Machine and Mechanisms (iNaCoMM 2019)
Published in the Springer 2019
🔗 Publication
Description
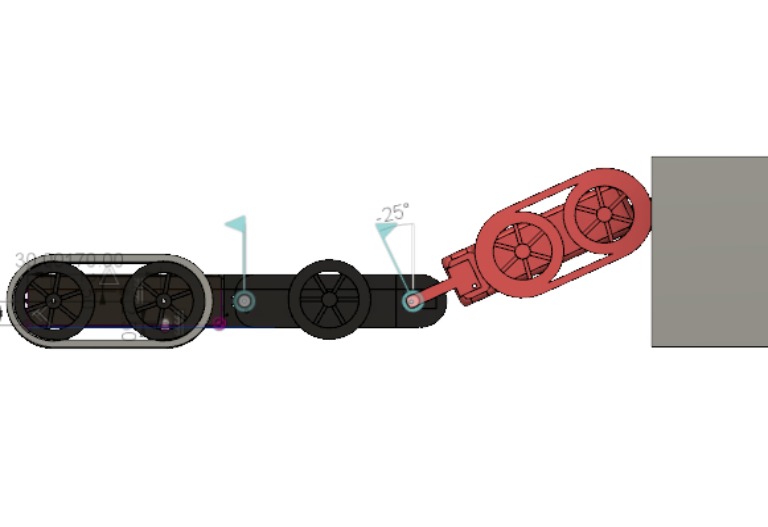
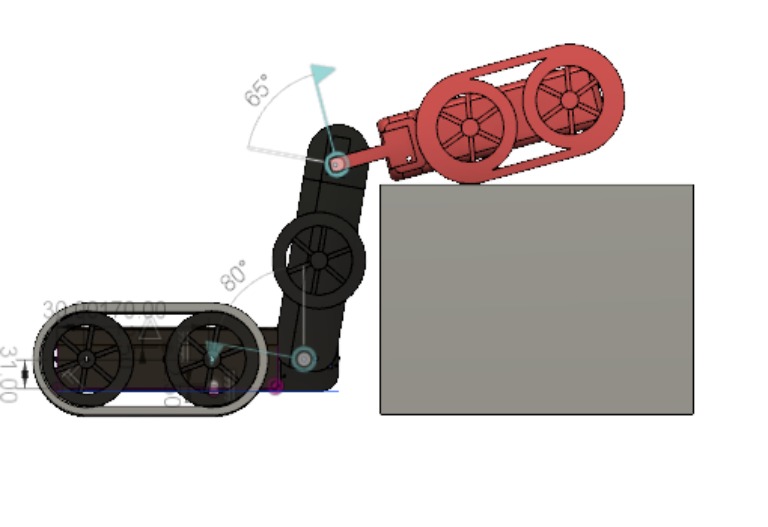
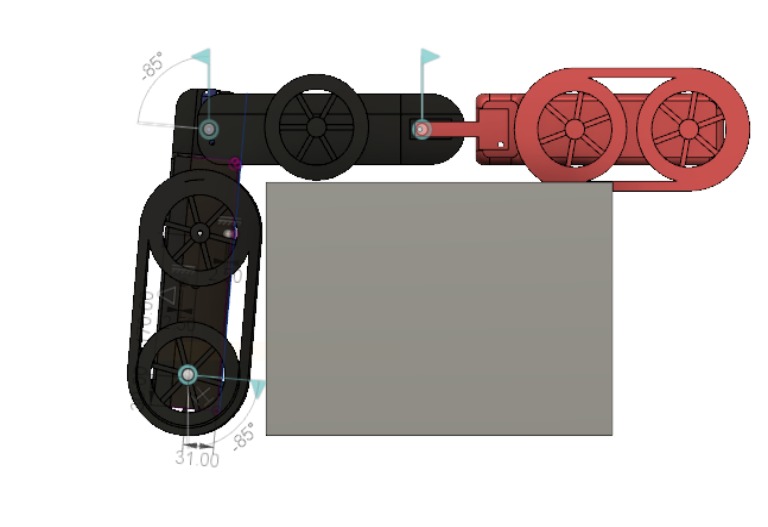
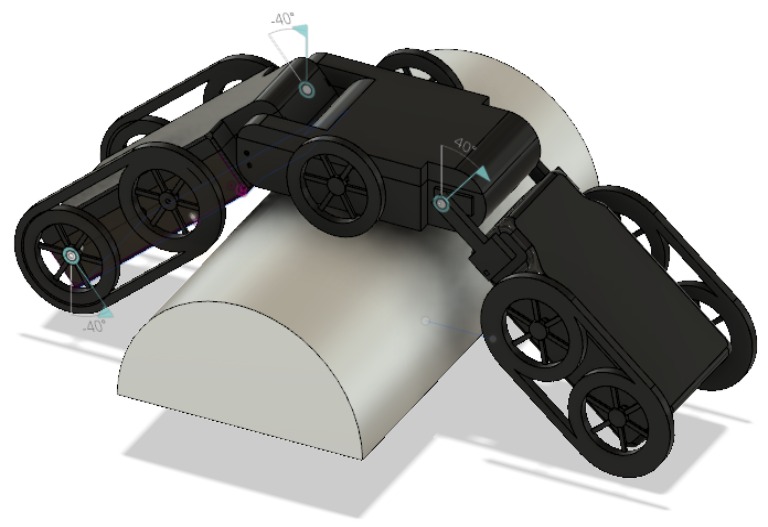
Natural disasters like earthquakes and landslides are sudden events that cause widespread destruction and major collateral damage including loss of life. Though disasters can never be prevented, their effects on mankind can surely be reduced. In this paper, we present the design and control of SRR (Search and Reconnaissance Robot), a robot capable of traversing on all terrains and locating survivors stuck under the debris. This will assist the rescue team to focus on recovering the victims, leaving the locating task for the Robots. The unique features of the SRR above existing ATVs are active-articulation, modularity, and assisted-autonomy. Active-articulation allows the SRR to climb objects much tall than itself. Modularity allows the SRR to detach into smaller modules to enter tight spaces where the whole body can’t fit. Assisted-autonomy allows the SRR to detect the presence of objects in front and climb autonomously over them.